Researchers have designed a low-cost, energy-efficient robotic hand that can grasp a range of objects – and not drop them – using just the movement of its wrist and the feeling in its ‘skin’.
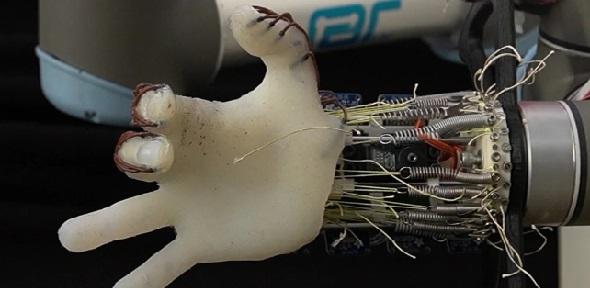
Grasping objects of different sizes, shapes and textures is a problem that is easy for a human, but challenging for a robot. Researchers from the University of Cambridge designed a soft, 3D-printed robotic hand that cannot independently move its fingers but can still carry out a range of complex movements. The robot hand was trained to grasp different objects and was able to predict whether it would drop them by using the information provided by sensors placed on its ‘skin’.
This type of passive movement makes the robot far easier to control and far more energy-efficient than robots with fully motorised fingers. The researchers say their adaptable design could be used in the development of low-cost robots that are capable of more natural movement and can learn to grasp a wide range of objects.
In the natural world, movement results from the interplay between the brain and the body: this enables people and animals to move in complex ways without expending unnecessary amounts of energy. Over the past several years, soft components have begun to be integrated into robotics design thanks to advances in 3D printing techniques, which have allowed researchers to add complexity to simple, energy-efficient systems.
Read the full University of Cambridge article.
Publication: ‘Predictive Learning of Error Recovery with a Sensorised Passivity-based Soft Anthropomorphic Hand.’ Advanced Intelligent Systems (2023). 10.1002/aisy.202200390
Images: Bio-Inspired Robotics Laboratory, University of Cambridge